UART Driver
RT-Threads implements a UART driver and supports console output. Linux uses UART0 as the
system console while RT-Thread uses UART2 as the system console. To verify the UART
function, use either of the following two methods:
-
After connecting and debugging the serial port, display the system output content and interact with the input commands.
For example, enter the command ps to display the currently running threads of the system.Figure 1. Running Threads 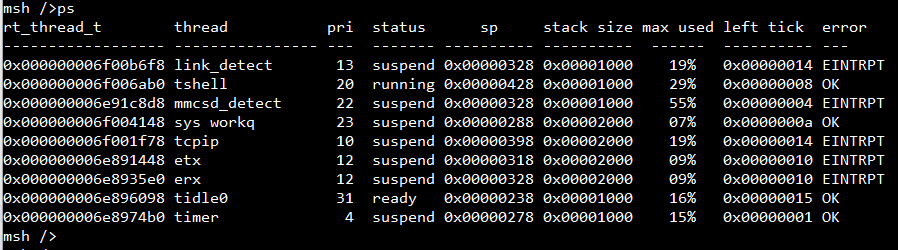
-
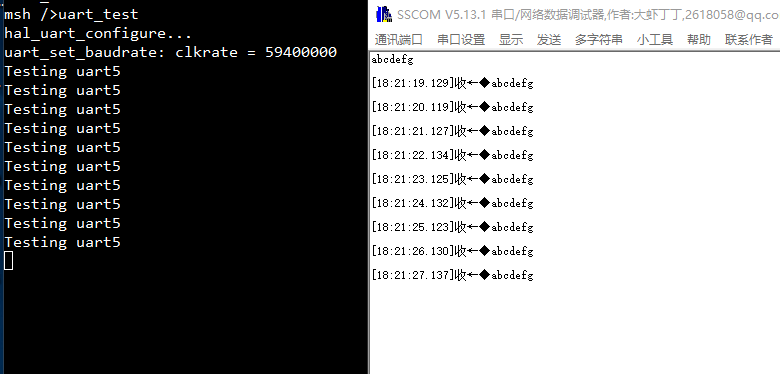
There is a test case for UART5 in the RTOS, which requires opening the serial debugging assistant on the PC. RT-Thread sends a string every second via UART5 and the debugging assistant will receive that string.
Figure 2. UART5 Test Case